
Se trata de idear, diseñar, planificar y construir una maqueta de un PUENTE LEVADIZO
con diversos materiales disponibles, que cumpla las siguientes condiciones:
CONDICIONES
- La elevación y descenso del tablero será suave.
- Su accionamiento será eléctrico a 4,5V y su control:
- El control será automático mediante Arduino y sensores de final de carrera.
- El ajuste de piezas y acabado deberá ser preciso.
- Las medidas máximas del conjunto no excederán de 300x200x150 mm
La solución final consiste en la construcción de una maqueta construida con listones de madera de samba y contrachapado.
 |
| Puente levadizo |
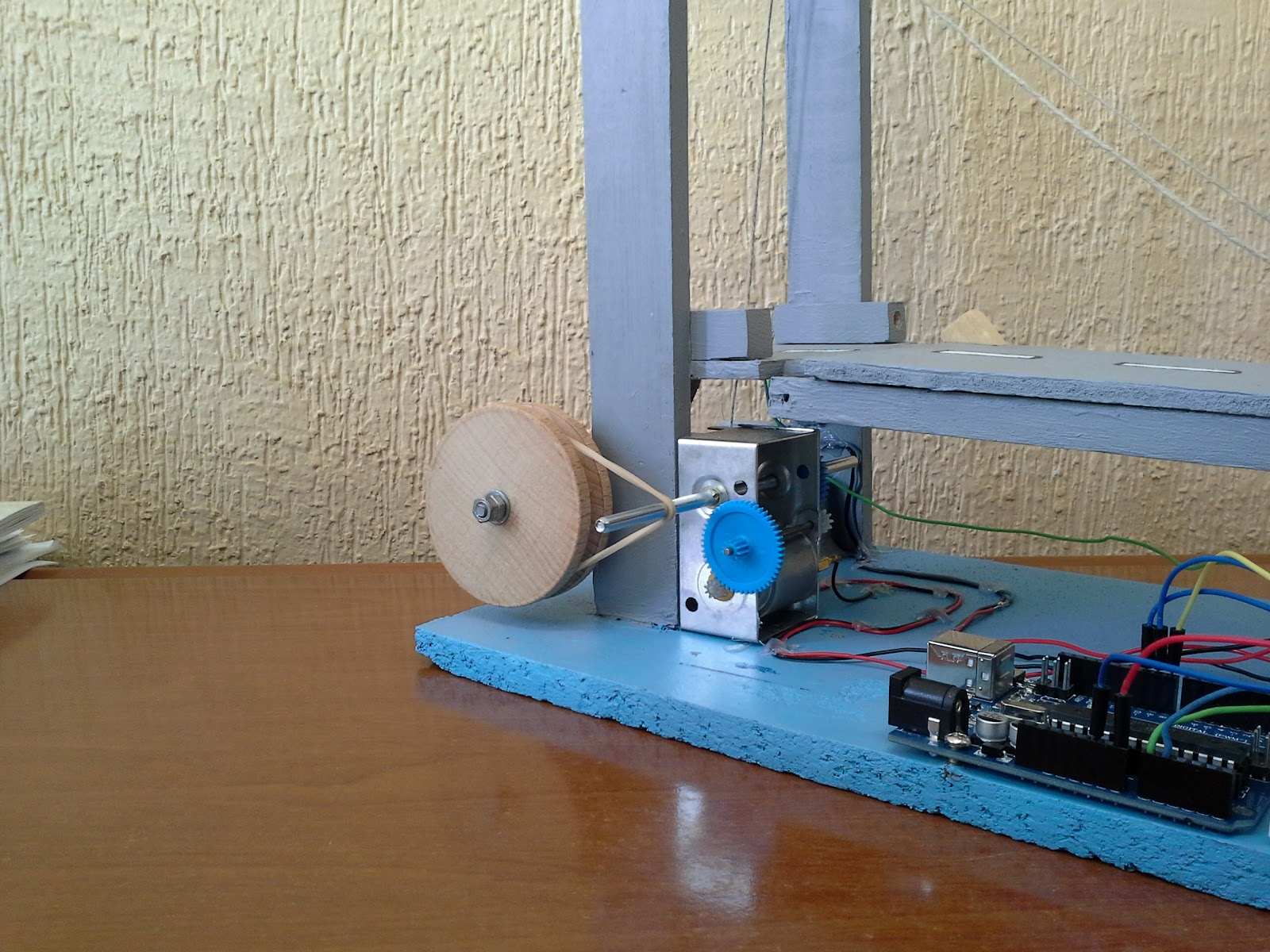
El sistema de subida y bajada está formado por un torno fabricado con varilla roscada.

En la parte superior hemos colocado dos poleas de madera, para reducir rozamiento del cable.

Como elementos final de carrera se ha utilizado dos LDR, una para detectar la subida del tablero,

y otra para detectar la bajada del tablero

Por último el circuito de control está formado por una placa de Arduino Uno, un pulsador, dos LDRs y un driver L293D.
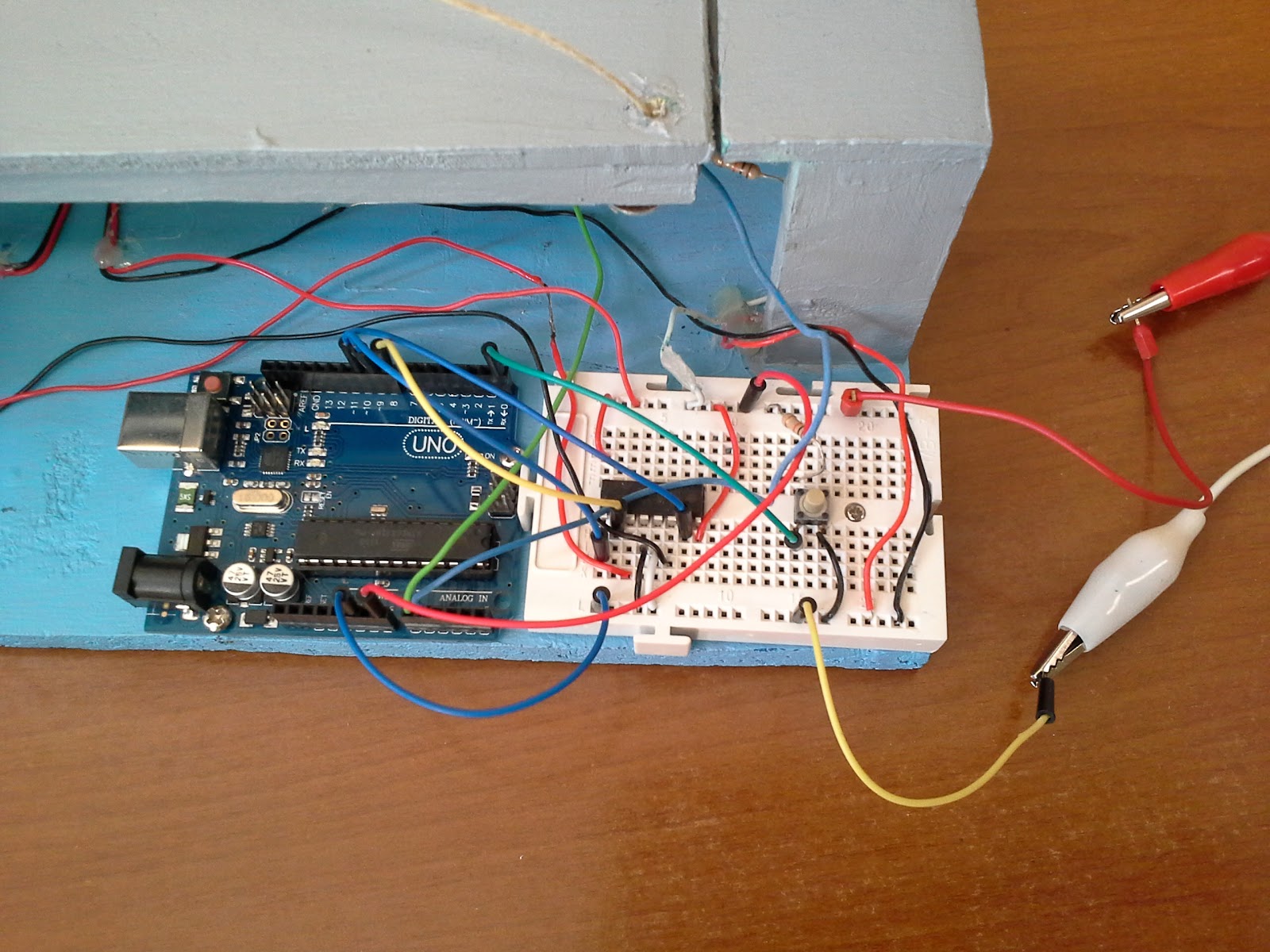
Circuito eléctrico

Programa
#define EA 9
#define I1 8
#define I2 10
#define pinPulsador 0
// Pin digital de entrada para el pulsador
int pinLDR_S = 0; //A0, Pin analógico para LDR superior
int pinLDR_I = 1; //A1, Pin analógico para LDR inferior
int valorLDR_S = 0;
int valorLDR_I = 0;
int velocidad=200;
int estadoPulsador=HIGH;
leer mas...
4 comentarios:
No sé puede abrir el código completo ayuda
Problema resuelto
Hola muy buen trabajo!
Qué resistencias has utilizado? Todas iguales?
Aprovecho para darte la enhorabuena por vuestro blog, muy inspirador
saludos
Resistencias de 10k
Publicar un comentario